
funzionamento schematico
esempi di laserscanner in azione
I diversi laserscanner terrestri variano per dimensione, peso, velocità… ma fondamentalmente sono costituiti tutti da una “testa” che gira su sè stessa montata su un tripode stabile.
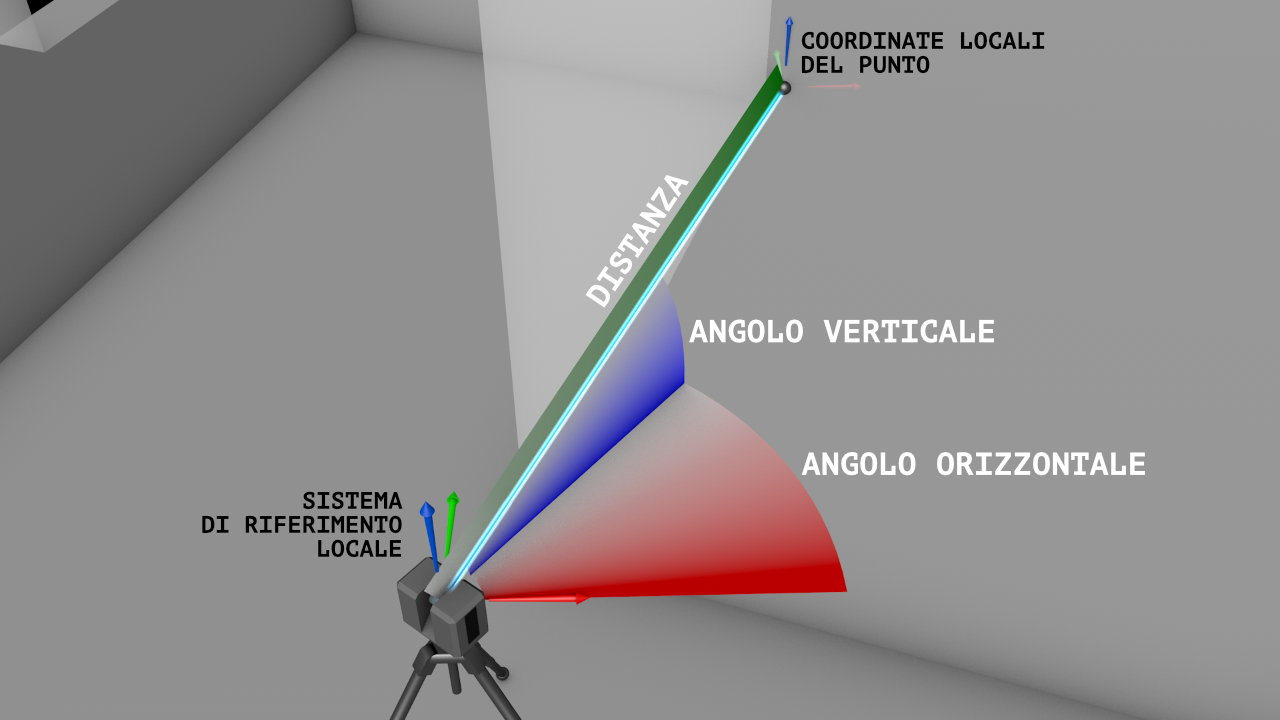
misure acquisite
Tutti i laserscanner registrano, per ogni punto campionato, angolo orizzontale, angolo verticale e distanza.
Specchio inclinato rotante
Per orientare l’impulso laser verso l’ambiente da misurare si fa riflettere su uno specchio orientato a 45° che ruota sul suo asse.
Il piano di scansione
Lo scanner ruota in verticale mentre lo specchio ruota sul suo asse. In questo modo si genera come un piano verticale di scansione che ruota in verticale per 180°.
La misura della distanza
Considerando costante la velocità di propagazione dell’impulso laser nello spazio si misura il tempo trascorso da andata e ritorno e si calcola la distanza. La misura può avvenire con il metodo TOF (Time Of Flight) o con il metodo della differenza di fase.
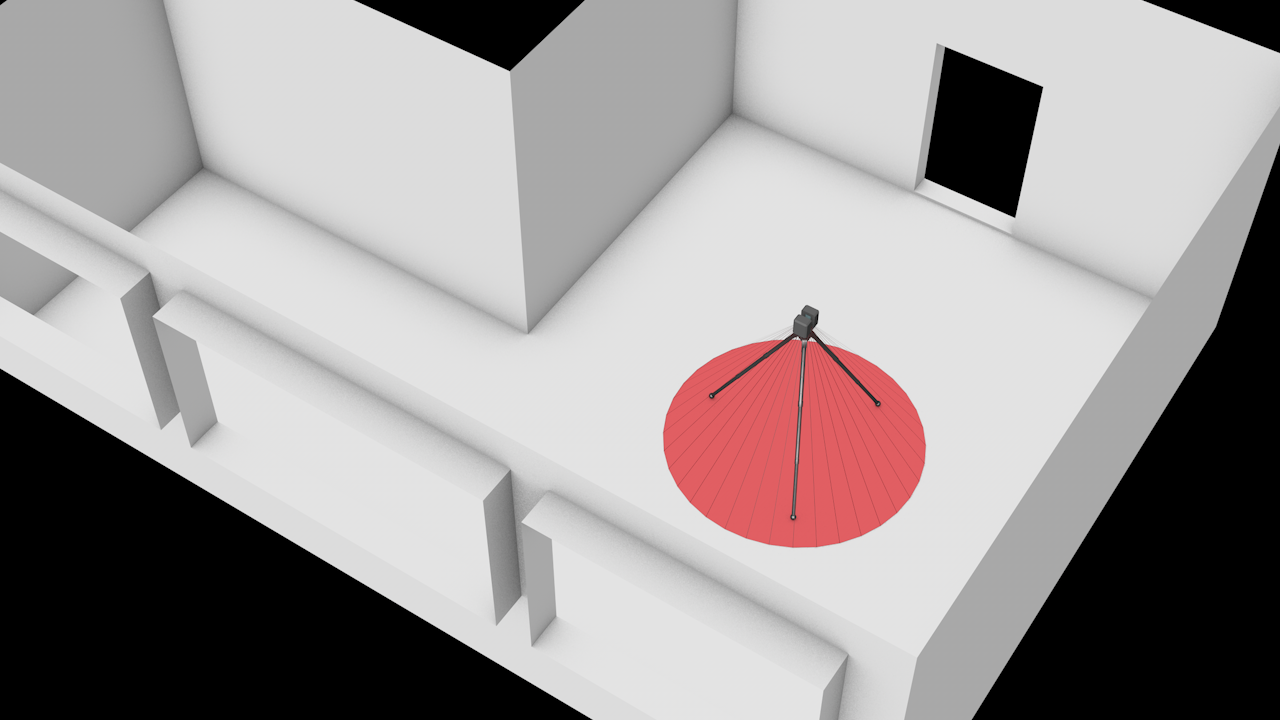
Il cono d’ombra dello scanner
La parte bassa di attacco dello scanner crea una zona d’ombra che non può essere rilevata.
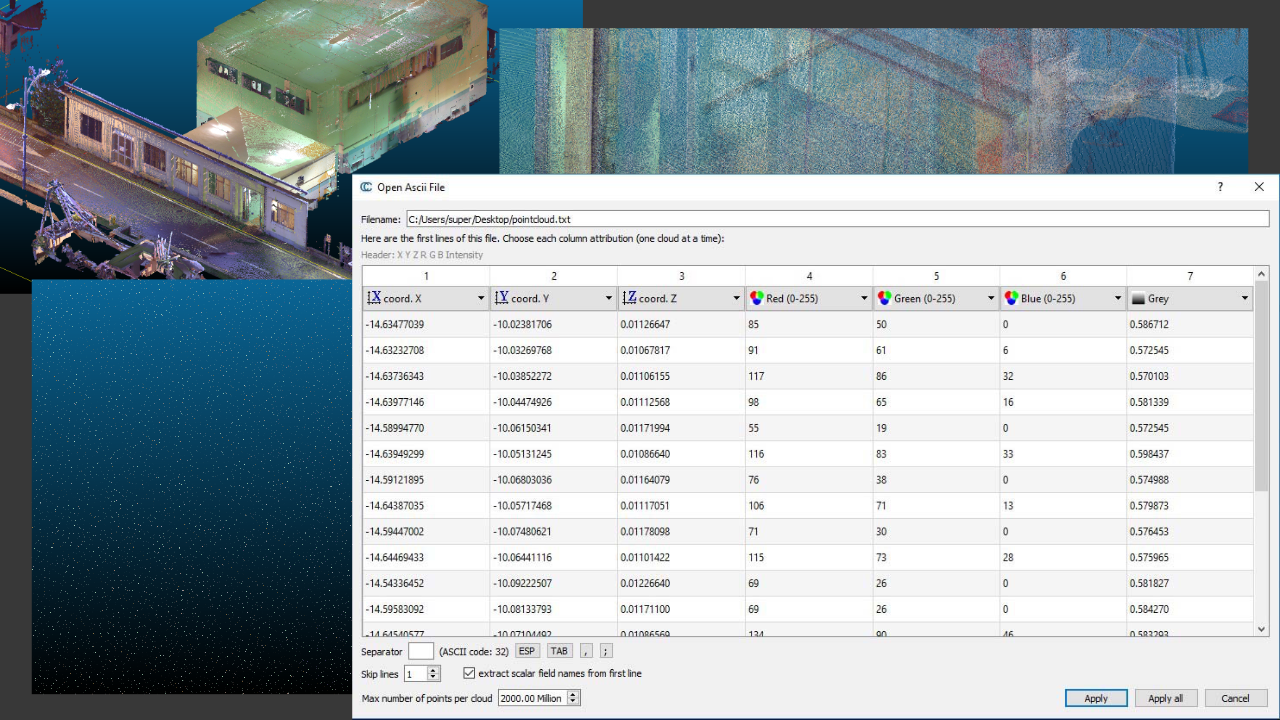
L’insieme dei punti campionati
La pointcloud sembra, da lontano, un oggetto continuo. Avvicinandosi è facile verificare che in realtà sono tutti punti separati posizionati nello spazio. La point cloud in realtà è un lungo elenco di righe (una per ogni punto) in cui sono riportate: la posizione, intensità, colore, etc…
Come ogni tecnologia ha un preciso ambito di lavoro
Il laser scanner terrestre è statico. La posizione dei punti misurati è relativa alla posizione dello scanner: per questo lo scanner deve restare fermo durante la fase di acquisizione. Per muovere liberamente lo scanner durante le misure è necessaria una piattaforma inerziale I.M.U

I limiti del sensore laser
Per poter essere rilevato il materiale dell’oggetto deve riflettere la luce del laser con una potenza sufficiente da raggiungere lo scanner in ritorno. La tipologia del materiale influisce notevolmente sulla qualità della misura.

Le operazioni di acquisizione dati
Completare le zone d’ombra. Il laserscanner può rilevare solo quello che “vede” dalla sua posizione, tutto quello che è nascosto resta una zona d’ombra vuota. Per completare il rilievo è necessario fare scansioni in più punti e colmare le zone d’ombra.
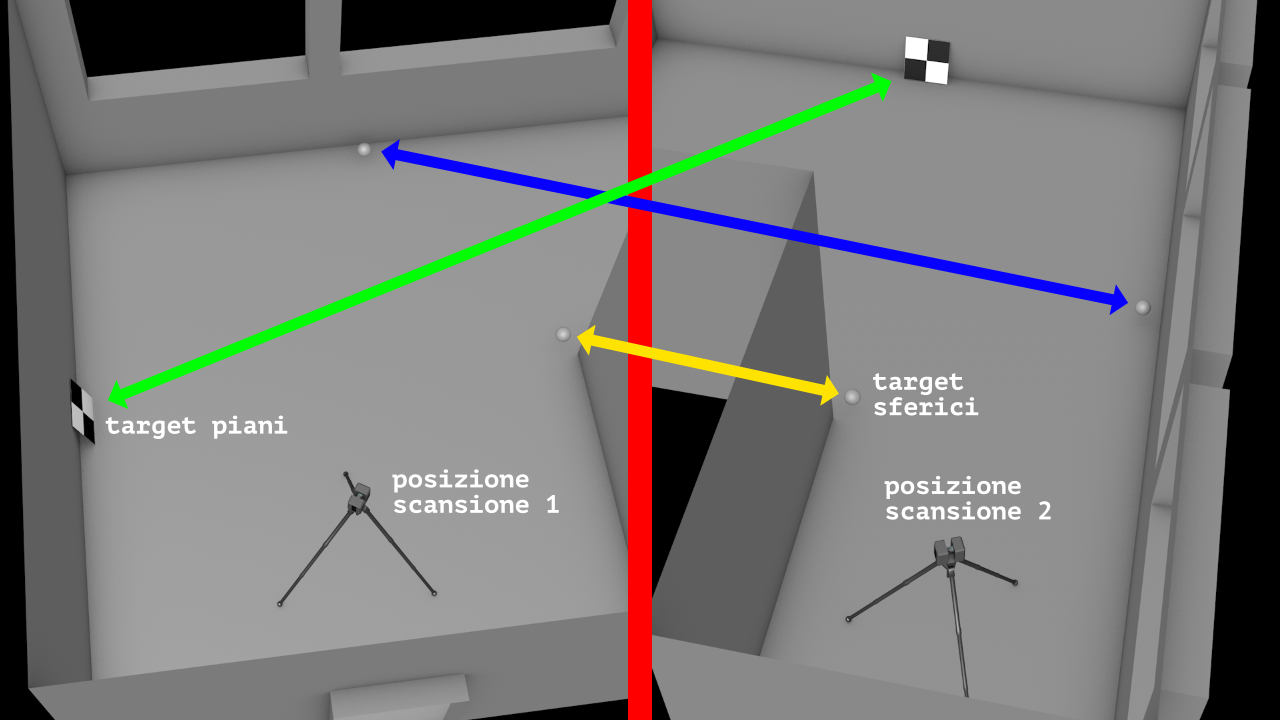
Metodo di allineamento con target
Posizionando dei target prima di eseguire le scansioni creo dei punti di riferimento ben definiti. Facendo coincidere almeno 3 target le due scansioni si combinano nello stesso spazio tridimensionale.
Metodo di allineamento statistico
Facendo coincidere statisticamente i punti nelle zone di sovrapposizione tramite algoritmi di ICP (Iterative Closest Point), detto anche Best Fitting e CloudToCloud, le scansioni si allineano correttamente.

Target vs ICP
Entrambi i metodi hanno vantaggi e svantaggi. La migliore scelta è spesso, soprattutto in rilievi complessi, usarli entrambi in un approccio misto.

Precisione e accuratezza
La precisione è tipica della qualità di misura di uno strumento. L’accuratezza riguarda il metodo, le procedure, gli algoritmi di calcolo, etc… La migliore accuratezza complessiva si ottiene equilibrando qualità degli strumenti e modalità di esecuzione del rilievo.

Intensità e colore
Tutti i laser scanner registrano di base la potenza luminosa di ritorno del laser “colorando” la nuvola di grigi che rappresentano l’intensità luminosa di risposta del punto misurato. Per poter colorare le scansioni tutti i laser scanner devono usare delle normali foto, generalmente scattate direttamente dallo scanner come dato aggiuntivo.

Pointcloud colorate vs Rilievo fotografico
Se l’obiettivo è una restituzione fotografica va comunque prevista un’ulteriore acquisizione di dati fotografici adatta alle applicazioni Image Based. La metodologia di acquisizione dei dati laser scanner è completamente diversa dalla metodologia di acquisizione della mappatura fotografica..
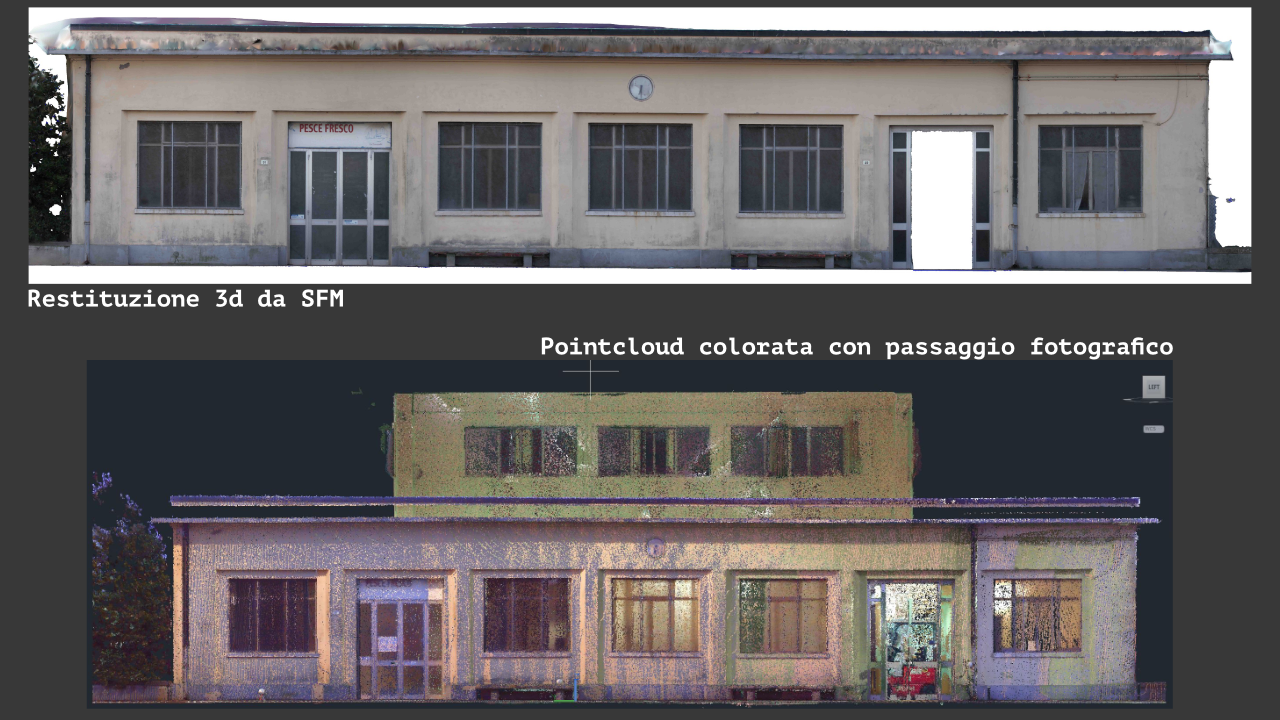
Valutazione del passaggio fotografico aggiuntivo
Acquisire anche le foto significa dover considerare le condizioni di luce dell’ambiente mentre il rilievo geometrico laser non richiede alcuna illuminazione. In particolare le foto di esterni per ottenere un buon fotopiano risentono molto delle ombre nette e andrebbero eseguite con cielo coperto e luce diffusa.

Trattamento dati - Predisporre i dati alla consegna e/o al lavoro successivo
Filtraggio statistico e manuale
Completato l’allineamento delle scansioni si producono i dati poincloud finali tramite algoritmi statistici (basati su criteri spaziali o qualitativi) e manuali. Il risultato definitivo è generalmente una poincloud complessiva del rilievo, in una dimensione adeguata all’hardware e alle informazioni necessarie alle fasi successive di restituzione.

Formati dei file point cloud
I formati in cui salvare i dati di una point cloud sono molti, e molto diversi fra loro nelle diverse caratteristiche. Il formato .e57 è attualmente uno dei più versatili, standard e open source. In generale è sempre bene verificare con grande attenzione la scelta del formato da usare.

Variabili di un rilievo laserscanner
Per eseguire correttamente un rilievo laserscanner è importante chiarire tutti questi aspetti così da assicurarsi di acquisire il giusto equilibrio qualità/costo dei dati.

La pointcloud è un dato grezzo: la restituzione è una lavorazione successiva e indispensabile
La restituzione del rilievo
In base all’oggetto rilevato e alla finalità del rilievo i dati grezzi della pointcloud devono essere elaborati tramite opportune interpretazioni per produrre supporti di lavoro adeguati (tavole, modelli 3D, rendering, stampa 3D, etc…)

